LLM on Camera as an Universal Sensor for Smart Mobility - Privacy-Preserving Edge AI PoC
Beyond 1984: Smart Cities Powered by Ethical AI and Citizen Empowerment
Proposal: LLM on Camera as a Universal Sensor for Smart Mobility - Privacy-Preserving Edge AI PoC
Executive Summary:
NinjaLABO proposes a 1.5-month Proof of Concept (PoC) to demonstrate the transformative potential of Local Large Language Models (LLMs) on edge cameras as a Universal Sensor for smart mobility. Utilizing NVIDIA JETSON Orin AGX for high-performance, real-time image and data processing, our solution will empower both public authorities and citizens with localized insights.
By ensuring full GDPR compliance through on-device processing, this solution opens new possibilities for smart city services. Citizens, via a public app interface, will be able to ask real-time questions about their immediate environment—from parking availability to public safety insights—unlocking a wide range of unseen use cases.
Challenge Context:
In modern cities, there is a growing demand for context-aware, real-time insights for mobility, safety, and general urban well-being. Current solutions may rely heavily on inflexible fixed purpose sensors or security camera with cloud infrastructure, which raises privacy concerns and introduces latency. Our camera as an Universal Sensor approach, leveraging NVIDIA JETSON Orin AGX, processes information locally, providing flexible, actionable insights without compromising privacy.
This PoC will not only demonstrate how this system improves mobility management and public safety, but it will also introduce new unseen citizen-driven use cases by allowing anyone to communite with LLM on CAM at real-time via an WebApp, effectively democratizing urban data.
Solution Overview:
Our LLM on Camera as a Universal Sensor solution utilizes multimodal LLMs to interpret visual data (i.e. camera /video capture images) and answer questions in real-time. With the NVIDIA JETSON Orin AGX, which provides industry-leading computational power, the solution will demonstrate several impactful use cases:
Use Cases:
Vacant Parking Slot Detection: Edge cameras detect available parking spaces and provide real-time updates to users by asking LLM, even with number of vacancy, size of such slot, and anything as long as LLM can understand or interpret.
Public Safety Monitoring: Detect disturbances or suspicious activity in public spaces. The system can instantly alert authorities to potential security threats, improving urban safety without exposing personal data by asking LLM with “any fights heppening?”.
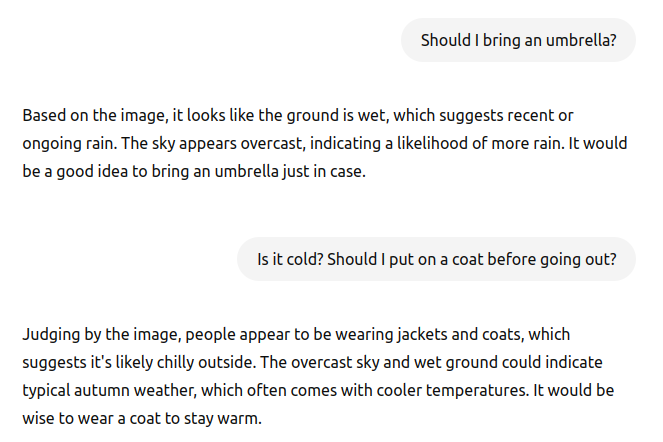
Environmental Monitoring: Citizens or local governments can query the system about feeling of air quality, noise levels, or local weather conditions (e.g., slippery sidewalks during winter) by asking LLM what kind of cloths people wear, ensuring timely responses to environmental changes.
Traffic Flow and Congestion Analysis: The system tracks traffic patterns and provides real-time feedback on road congestion, alerting users to alternate routes or times to travel if needed via LLM.
Public Event Reporting: The app can report real-time crowd density and event status during festivals, concerts, or protests, helping citizens avoid overcrowded areas or plan their attendance.
Emergency Support: In the case of a disaster (e.g., a fire or flood), the system can help first responders by providing any type of localized data on obstacles, congestion, or affected areas.
Localized Queries from Citizens: Any citizen can ask the LLM on Camera specific questions about the local environment—e.g., “Are there available seats in the park?” or “Is there a bike rack near this building?”—unlocking real-time insights and enhancing city navigation.
The flexibility of the Universal Sensor allows it to be expanded into sectors like tourism, disaster response, and public infrastructure management, enabling both real-time insights and enhanced citizen engagement as a part of City infrastructure.
Example
Normally the image itself won’t be seen by users but only conversation.
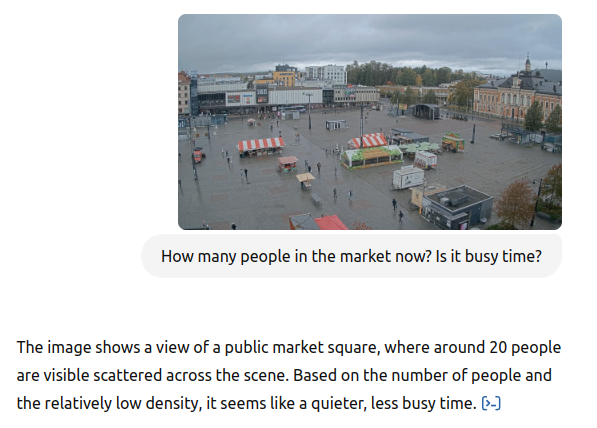
And you can withdraw any insights via LLM.
Technical Approach:
The NVIDIA JETSON Orin AGX provides significant computational capacity for real-time AI applications, making it the ideal platform for running multimodal LLMs. The PoC will utilize the following:
NVIDIA JETSON Orin AGX: A powerful edge AI platform capable of handling advanced computations with up to 200 TOPS of performance.
Multimodal LLM: Pre-trained LLMs that can interpret visual, textual, and contextual data in real-time, optimized for efficient on-device processing.
Advanced Model Compression: Techniques like quantization and pruning ensure that LLMs are optimized for running efficiently on the Orin AGX.
By keeping data processing local, we eliminate the need for external data transmission, reducing latency while preserving privacy.
Expected Outcomes and Impact:
By the end of this 1.5-month PoC, we expect to demonstrate:
- Parking Slot Detection: Detecting vacant parking spaces and providing real-time updates.
- Public Safety Monitoring: Detecting and responding to public safety incidents.
- Citizen Engagement via WebApp: Offering citizens real-time access to the system’s insights by allowing them to query localized information through the app. This democratization of data will unlock unforeseen use cases that expand beyond mobility and safety.
- Environmental and Traffic Monitoring: Demonstrating how the Universal Sensor can track and respond to environmental and traffic conditions in real time, supporting various urban planning initiatives.
Project Timeline (1.5 Months):
- Week 1 - Initial Setup:
- Install and configure NVIDIA JETSON Orin AGX and integrate multimodal LLMs for the core and extended use cases.
- Begin small-scale testing in a controlled environment.
- Week 2-3 - Use Case Development:
- Fine-tune parking slot detection, public safety monitoring, and citizen query capabilities.
- Develop app functionality for citizen interaction with the Universal Sensor.
- Week 4-6 - Deployment and Validation:
- Deploy the system in a small urban environment (e.g., a parking lot, public square).
- Test accuracy, latency, and app engagement, collecting feedback from stakeholders and citizens.
- Analyze results for further scalability.
Collaboration and Ecosystem:
We will collaborate with local municipalities and NVIDIA to optimize the NVIDIA JETSON Orin AGX platform for smart mobility applications. Citizen engagement will be supported through partnerships with local app developers and parking management services.
Conclusion:
NinjaLABO’s LLM on Camera as a Universal Sensor is a powerful, privacy-preserving tool designed to transform smart city services. By leveraging the advanced capabilities of NVIDIA JETSON Orin AGX and introducing an open citizen engagement app, this PoC will demonstrate the potential for real-time mobility management, public safety enhancement, and localized insights for citizens. The possibilities of new use cases emerging from public queries are vast, making this technology a cornerstone of smart city innovation.
We look forward to showcasing how Universal Sensors can transform the way citizens interact with and benefit from their urban environments, fully aligning with Helsinki’s goals of AI-powered mobility.